Multi-index notation
The mathematical notation of multi-indices simplifies formulae used in multivariable calculus, partial differential equations and the theory of distributions, by generalising the concept of an integer index to an ordered tuple of indices.
Contents |
Multi-index notation
An n-dimensional multi-index is an n-tuple

of non-negative integers (i.e. an element of  ). For multi-indices
). For multi-indices  and
and  one defines:
one defines:
- Componentwise sum and difference


- Sum of components (absolute value)



-
 where
where 

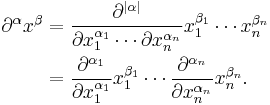
- Higher-order partial derivative
-
 where
where 
Some applications
The multi-index notation allows the extension of many formulae from elementary calculus to the corresponding multi-variable case. Below are some examples. In all the following,  (or
(or  ),
),  , and
, and  (or
(or  ).
).
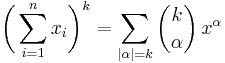
Multinomial theorem
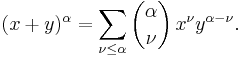
Multi-binomial theorem
Leibniz formula
For smooth functions f and g
Taylor series
For an analytic function f in n variables one has
In fact, for a smooth enough function, we have the similar Taylor expansion

where the last term (the remainder) depends on the exact version of Taylor's formula. For instance, for the Cauchy formula (with integral remainder), one gets

General partial differential operator
A formal N-th order partial differential operator in n variables is written as
Integration by parts
For smooth functions with compact support in a bounded domain  one has
one has

This formula is used for the definition of distributions and weak derivatives.
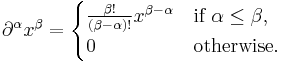
An example theorem
If are multi-indices and  , then
, then
Proof
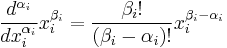
The proof follows from the power rule for the ordinary derivative; if α and β are in {0, 1, 2, . . .}, then

Suppose  ,
,  , and . Then we have that
, and . Then we have that
For each i in {1, . . ., n}, the function  only depends on
only depends on  . In the above, each partial differentiation
. In the above, each partial differentiation  therefore reduces to the corresponding ordinary differentiation
therefore reduces to the corresponding ordinary differentiation  . Hence, from equation (1), it follows that
. Hence, from equation (1), it follows that  vanishes if αi > βi for at least one i in {1, . . ., n}. If this is not the case, i.e., if α ≤ β as multi-indices, then
vanishes if αi > βi for at least one i in {1, . . ., n}. If this is not the case, i.e., if α ≤ β as multi-indices, then
for each  and the theorem follows.
and the theorem follows. 
References
- Saint Raymond, Xavier (1991). Elementary Introduction to the Theory of Pseudodifferential Operators. Chap 1.1 . CRC Press. ISBN 0-8493-7158-9
This article incorporates material from multi-index derivative of a power on PlanetMath, which is licensed under the Creative Commons Attribution/Share-Alike License.